Key features
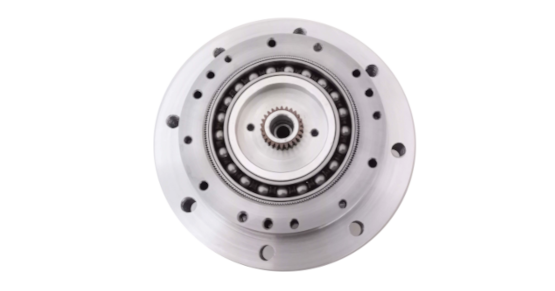
The strain wave gear
Our Mercury range of digital servos contain built-in strain wave gear drives. This allows us to provide near-zero backlash and a high reduction ratio in a compact unit.

The motor
Mercury digital servos are driven by a 300W, 3-phase, 28 pole brushless dc motor. Brushless dc motors offer improved power to weight ratio and reliability in comparison to conventional brushed dc motors.

The electronics
Mercury digital servos contain integrated control electronics. At the heart of the controller is a powerful ARM Cortex M4 micro controller. In addition to motor control, the firmware implements a rich API to allow precise position, velocity, acceleration and torque control. See the Mercury Technical Manual for details of the API.
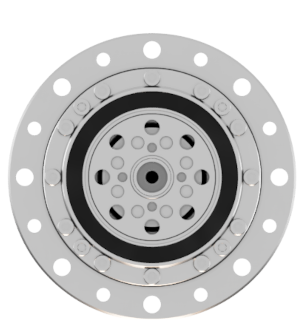
Output configuration
The output horn of a standard Mercury digital servo is supported by a crossed roller bearing. This allows Mercury servos to be used in applications that are subject to large axial and radial loads.
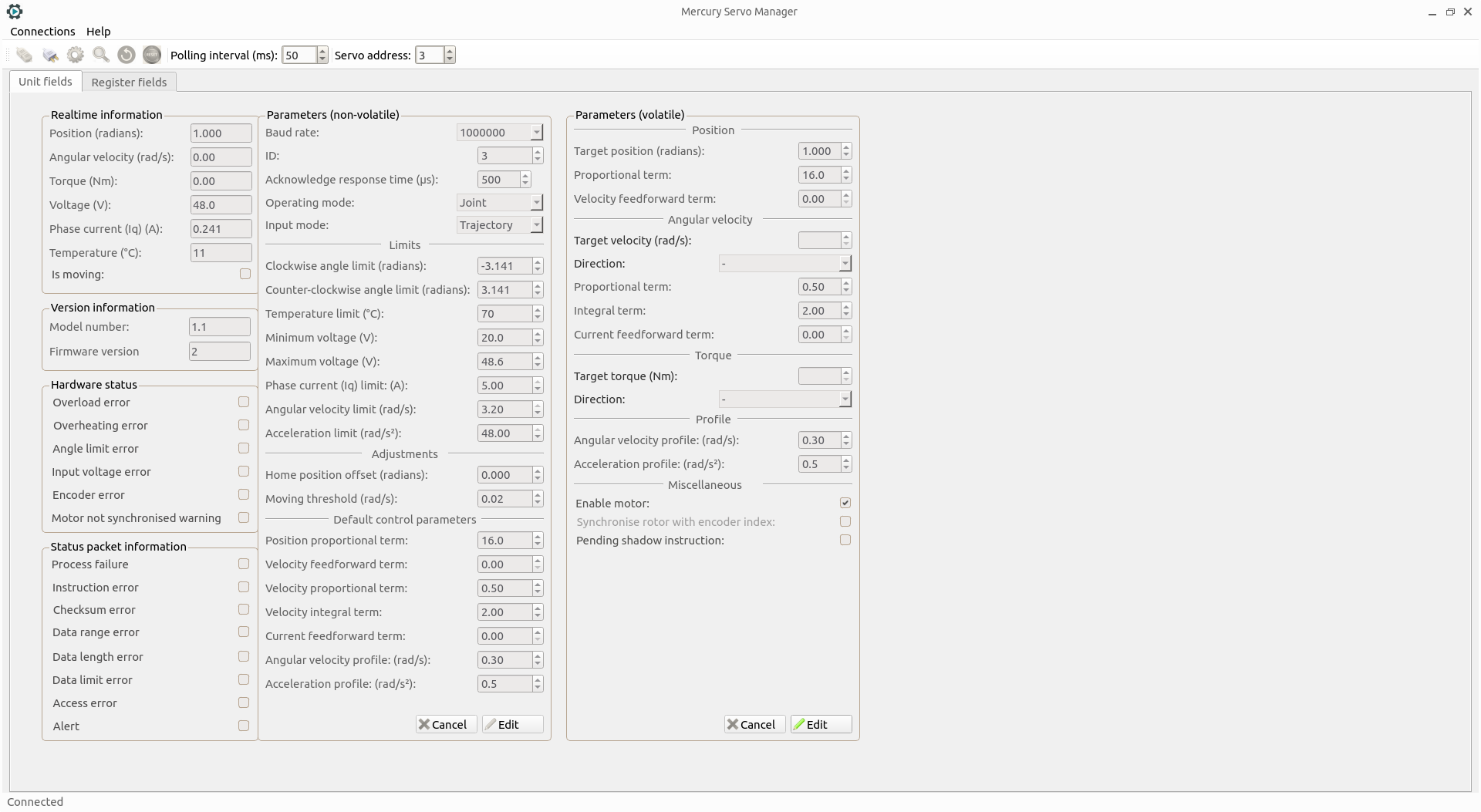
The software
A cross-platform opensource configuration application is provided to configure Mercury digital servos. Furthermore, ROS2 (Robot Operating System) packages are provided to facilitate the easy integration of Mercury digital servos into your robotics system. A complete cross-platform opensource C++ Software Development Kit (SDK) is also provided to simplify the integration of Mercury digital servos into your software system.